
































































FOR AUTHORS
Search
Search Results
##search.searchResults.foundPlural##
-
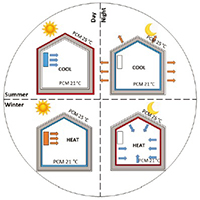
Effect of envelope characteristics on the accuracy of discretised greenhouse model in TRNSYS
2172Appendix: 394PDF: 632HTML: 152 -
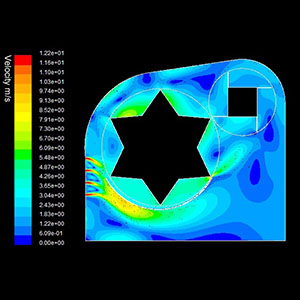
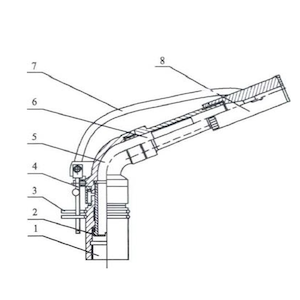
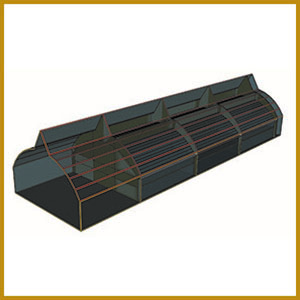
Research on inspection route of hanging environmental robot based on computational fluid dynamics
2965PDF: 452SUPPLEMENTARY MATERIAL: 100HTML: 24 -

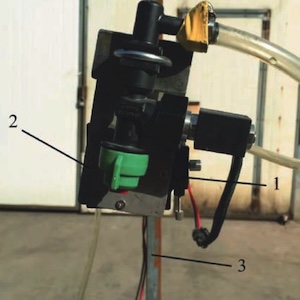
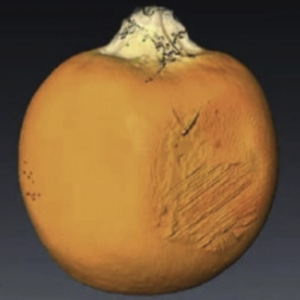
Fuzzy neural network PID control design of camellia fruit vibration picking manipulator
1941PDF: 624Appendix: 175HTML: 17 -

Effect of picking rollers on corn stover attitude
329PDF: 122HTML: 38 -
Optimization design and experiment of double-helix total mixed rations preparation mixer for silage straw feed
1668PDF: 988SUPPLEMENTARY MATERIAL: 142HTML: 30 -
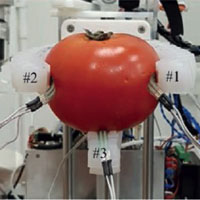
The design of a force feedback soft gripper for tomato harvesting
6033PDF: 2435HTML: 762 -

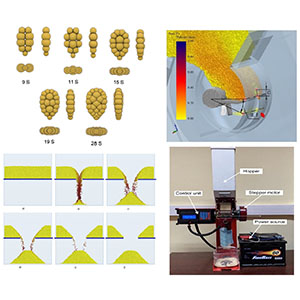
Study on the seed metering performance of potato seed metering device with three claw type on DEM
410PDF: 665Supplementary: 70HTML: 32 -

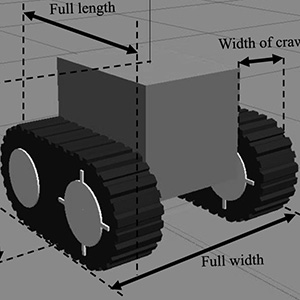
Design of attitude-adjustable chassis and dynamic stress analysis of key components for crawler combine harvester
1498PDF: 1060Supplementary: 93HTML: 81 -

Analysis of temperature distribution in a naturally ventilated single-span greenhouse using computational fluid dynamics
793PDF: 213Supplementary: 48HTML: 81 -
Optimal design of transplanting mechanism with differential internal engagement non-circular gear trains
1647PDF: 796Appendix: 207HTML: 112 -

Analysis of the internal shading in a photovoltaic greenhouse tunnel
2792PDF: 1264HTML: 407 -

Analysis of the energy consumption of a rotary harrow
1722PDF: 905HTML: 60 -

Impact of a flexible irrigation reservation system on water savings in a surface irrigation district in northern Italy
547PDF: 346Supplementary: 83HTML: 11 -

Evaluating flow regime alterations due to point sources in intermittent rivers: A modelling approach
1827PDF: 755S1: 356S2: 443S3: 322HTML: 92 -
Dynamic neural network modeling of thermal environments of two adjacent single-span greenhouses with different thermal curtain positions
3296PDF: 465SUPPLEMENTARY MATERIAL: 146HTML: 45 -

Performance analysis of photovoltaic plants installed in dairy cattle farms
3880PDF: 1409Appendix: 397HTML: 2095


